在移动机器人的日常使用中,电量是一个非常重要的指标。然而,很多用户都会发现,移动机器人的 SOC(State of Charge,荷电状态)电量显示并不总是准确的。甚至,导致SOC跳变严重故障停机。那么,为什么会出现这种情况呢?
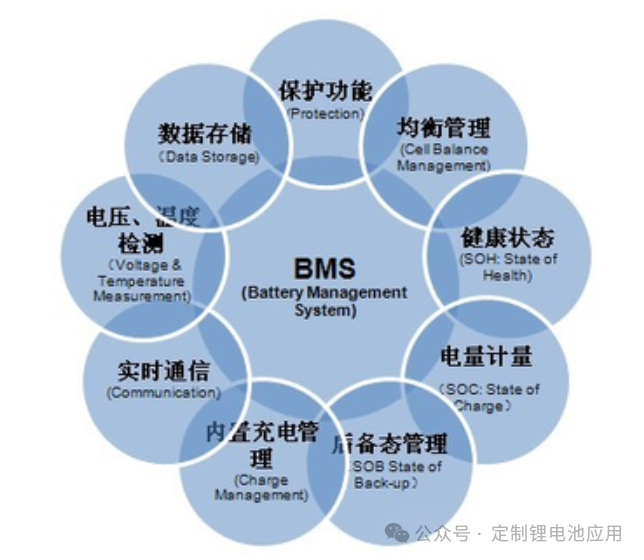
首先,只测定电压值估算SOC电量的方式使用在移动机器人领域,故障率很大。电量显示SOC 的计算是基于电池的电压、电流和温度等参数进行安时积分法计算得知的通过通讯连接到显示器或者移动机器人的管理系统中。然而,这些参数并不是一成不变的,它们会随着电池的使用情况、环境温度等因素而发生变化。因此,如果电池管理系统不能及时、准确地获取这些参数,就会导致 SOC 电量的计算不准确。
其次,电池的容量会随着使用时间的增加而逐渐下降。这是因为电池的化学反应会随着时间的推移而逐渐衰减,导致电池容量的损失。如果电池管理系统不能准确地估算电池的容量,就会导致 SOC 电量的计算不准确。
最后,电池管理系统本身的算法和精度也会影响 SOC 电量的准确性。如果电池管理系统的算法不够精确,或者传感器的精度不够高,就会导致 SOC 电量的计算误差。
综上所述,移动机器人的 SOC 电量总是不准的原因是多方面的。为了提高 SOC 电量的准确性,我们可以采取以下措施:
1. 选用高质量的电池和电池管理系统,提高电流识别的精确程度,确保它们能够准确地获取电池的参数。
2. 定期对电池满充进行校准或分级校准,以确保电池管理系统能够准确地估算电池的容量。
3. 优化电池管理系统的算法,提高其精度和准确性。
如果你对移动机器人的 SOC 电量准确性有任何疑问,建议咨询专业的技术人员或电池供应商,以获取更准确的建议和指导。
天津佳创博为科技是一家专业AGV零部件方案供应商,提供最可靠的AGV电控及机械零部件。
关键词:AGV调度系统
参考文献:FancyAGV研究室
